北京邮电大学创新创业智能车循迹python版
因为想要创新学分,所以选了创新创业智能车课程,项目要求完成智能车的循迹和避障。
由于笔者不喜欢使用VPL的图形化(报用qWq), 故而使用手写代码的方式实现。
主要思路
通过接发TCP包的方法与智能车进行交互, 创建两个并行任务,一个用于实时接收TCP报文来更新小车状态, 一个用于读取小车状态,作出决策并发送报文控制小车。
编程语言的选择
python笔者的项目采用了该语言,主要原因是方便且能快速实现(以及没考虑到GIL会影响介么大),并采用asyncio作为“并行”库(实际上只能并发,笔者最初以为只有两个任务,用python也足够了,虽然实际上也够,但是写起来没那么舒服了,可能使用threads会好一点)go后续又采用go重构了一遍(虽然实际效果貌似变化不大,emmm...应该是硬件/小车的原因)
当然采用什么编程语言并不是重要(吗?,不许用rust 😠 )
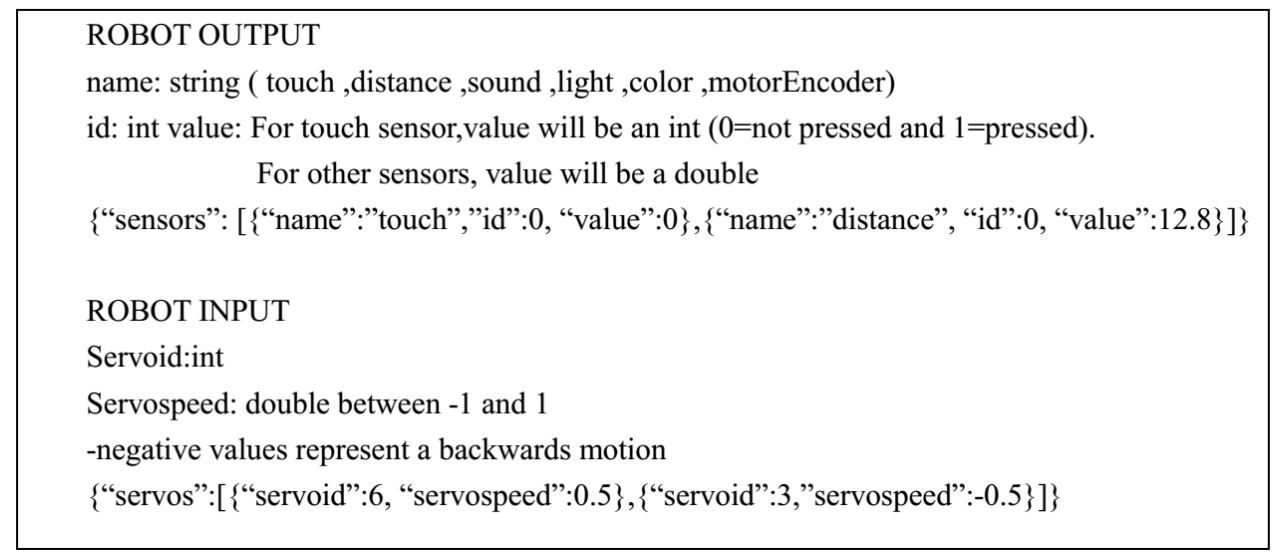
通信协议
初步思路
由于硬件限制,只有一个红外传感器用于判断底部是否为黑色, 一个红外传感器+超声波传感器用于确定前方是否有障碍,信息量非常小(当然超声波传感器有大概的距离,本项目不考虑介么多,取较小距离为有障碍), 为 。 故而首先考虑的基本策略是偏航时左右摆头寻找正确的角度前行。
遇到的问题和改进方案
小车左右轮力矩不一致
由于硬件限制,若设置两个轮的速度一致的话小车直行也会偏转, 而且小车并不能知道自己“偏航”了,故而采取手动测试的方式, 通过二分左右轮的速度来得到使得小车直行的左右轮速度。并且这个关系并非简单的倍速或差量的关系。
因此无奈之下只能选取一个固定的速度来测试(比如左轮设置为0.8, 然后不断二分得到直行时右轮的速度为 0.x ), 整个系统都在该速度下运行。
Tips
各个小车有各个的体质, 因此挑选一辆"正确"的小车是很重要的事情。 以及测试完小车后保护小车也是很重要的,不要找不到了或者被人踢坏了, 否则得重新找车及测速。
小车容易冲出轨道
小车还未找到合适的“姿势”就前进,导致频繁冲出赛道,耗费时间。
基于此,采取速度渐进增长的形式,使得刚回到正确姿势时速度较慢,从而不会前进太多,便于更快的回到正确的姿势。
小车总是左右左摆头太蠢了
首先采取的改进方案是先左小幅度转弯,后右大幅度转弯,最后左大幅度转弯寻找正确姿势,但效果不理想,遂放弃。
考虑到小车路线是闭合的,且局部多为凸多边形, 故而每次转弯时优先考虑上一次转弯的方向, 这样子能减少摆头次数, 多数情况转弯的方向都是对的。(有一些启发式的smell)
其它问题
时间有点久搞忘了,记起来再补充
设计方案参考
和机械臂联动
emm... 本来想让机械臂识别“货物”并放在车上托运并最后卸货的,但是小车不好运货。遂放弃,转而实验机械臂放置障碍在赛道上。
结语
本次智能车实验不是很愉快, 特别是重调了3,4次速度(几次换车其中一次车被踩烂了)
如果没有熟悉的编程语言(例如c)且不了解 多线程/协程,网络I/O的话 还是采用VPL图形化吧 不过我认为报用就是了。
记得给我的仓库点Star欧~